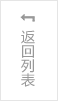
1.步進電機基本結構(如圖1所示)
 圖 1
步進電機基本結構圖
2.工作原理
步進電機驅動器
圖 1
步進電機基本結構圖
2.工作原理
步進電機驅動器根據外來的控制脈沖和方向信號, 通過其內部的邏輯電路,控制步進電機的繞組以一定的時序正向或反向通電,使得電機正向/反向旋轉,或者鎖定。
以1.8度
兩相步進電機為例:當兩相繞組都通電勵磁時,電機輸出軸將靜止并鎖定位置。在額定電流下使電機保持鎖定的最大力矩為保持力矩。如果其中一相繞組的電流發生了變向,則電機將順著一個既定方向旋轉一步( 1.8度)。同理,如果是另外一項繞組的電流發生了變向,則電機將順著與前者相反的方向旋轉一步( 1.8 度)。當通過線圈繞組的電流按順序依次變向勵磁時,則電機會順著既定的方向實現連續旋轉步進,運行精度非常高。對于1.8度兩相步進電機旋轉一周需200步。
兩相步進電機有兩種繞組形式:雙極性和單極性。
雙極性電機每相上只有一個繞組線圈,電機連續旋轉時電流要在同一線圈內依次變向勵磁,驅動電路設計上需要八個電子開關進行順序切換。單極性電機每相上有兩個極性相反的繞組線圈,電機連續旋轉時只要交替對同一相上的兩個繞組線圈進行通電勵磁。驅動電路設計上只需要四個電子開關。在雙極性驅動模式下,因為每相的繞組線圈為100%勵磁,所以雙極性驅動模式下電機的輸出力矩比單極性驅動模式下提高了約40%。


2 相(雙極性)步進電機 2 相(單極性)步進電機
圖 2 步進電機工作原理圖
步進電機的特性
1、 精準的位置控制
依照輸入脈沖的數量,確定軸轉動的角度。位置誤差非常小(小于1/10度),且不累積。
2、精確的轉速
步進電機的轉速取決于輸入電脈沖的頻率,可以實現精確控制和方便調節。因此被廣泛地應用于各種運動控制領域。
3、 正向/反向轉動,急停及鎖定功能
在整個速度范圍內都可以實現對電機力矩和位置的有效控制,包括靜力矩。在電機鎖定狀態下(電機繞組中存在電流,而外部沒有旋轉的脈沖指令輸入),仍然保持一定的力矩輸出。
4、 低轉速條件下的精準位置控制
步進電機不需要借助齒輪箱的調節,就可以在非常低的轉速下平穩運行,同時輸出較大的力矩,避免了功率的損耗和角度位置偏差,同時降低了成本,節省了空間。
5、 更長的使用壽命
步進電機的無電刷設計保證了電機的使用壽命很長。步進電機的壽命通常取決于軸承。
振動與噪音
一般來講,步進電機在空載運行情況下,當電機的運行頻率接近或等于電機轉子的固有頻率時會發生共振, 嚴重的會發生失步現象。
針對共振的問題,有以下幾種解決方案:
A. 避開振動區
使電機的工作頻率不落在振動范圍內。
B. 采用細分的驅動模式
使用微步驅動模式,將原來的一步細分為多步運行,提高電機的每步分辨率,從而降低振動。這可以通過調整電機的相電流比來實現的。微步并不會增加步距角精確度,卻能使電機運行更加平穩,噪音更小。一般電機在半步運行時,力矩會比整步時小15%,而采用正弦波電流控制時,力矩將減小30%。
小結
在機械設計中,我們經常用到步進電機,比如,用步進電機驅動同步帶軸,實現直線運動;再比如,用步進電機驅動滾珠絲杠軸,也可以把旋轉運動轉換為直線運動。因為不需要反饋系統,所以步進電機的最大優點是經濟實用并且可以獲得不錯的精度。其實,除了機器中的運動平臺,生活中也可以發現步進電機的存在,比如打印機,掃描儀,相機,ATM機,3D打印機等等。