十二年專注于步 進 電 機解決方案多年的技術應用經驗團隊,精易求精的產品生產制造
全國咨詢熱線400-1755-808
步進電機是一種直接將電脈沖轉化為機械運動的機電裝置, 通過控制施加在電機線圈上的電脈沖順序、 頻率和數量, 可以實現對步進電機的轉向、 速度和旋轉角度的控制。在不借助帶位置感應的閉環反饋控制系統的情況下、 使用步進電機與其配套的驅動器共同組成的控制簡便、 低成本的開環控制系統, 就可以實現精確的位置和速度控制。
步進電機的特性
精準的位置控制依照輸入脈沖的數量, 確定軸轉動的角度。位置誤差非常小(小于1/10度), 且不累積。
精確的轉速步進電機的轉速取決于輸入電脈沖的頻率, 可以實現精確控制和方便調節。因此被廣泛地應用于各種運動控制領域。
正向/反向轉動, 急停及鎖定功能在整個速度范圍內都可以實現對電機力矩和位置的有效控制, 包括靜力矩。在電機鎖定狀態下(電機繞組中存在電流, 而外部沒有旋轉的脈沖指令輸入), 仍然保持一定的力矩輸出。
低轉速條件下的精準位置控制步進電機不需要借助齒輪箱的調節, 就可以在非常低的轉速下平穩運行, 同時輸出較大的力矩,避免了功率的損耗和角度位置偏差, 同時降低了成本, 節省了空間。
更長的使用壽命步進電機的無電刷設計保證了電機的使用壽命很長。步進電機的壽命通常取決于軸承。
基本結構和工作原理
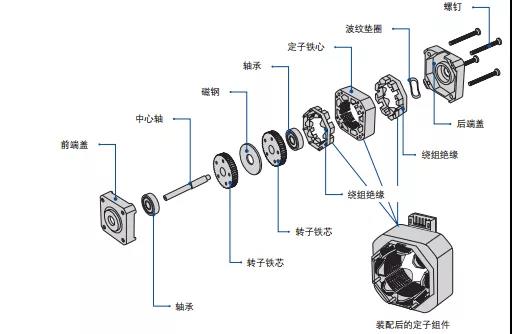
基本結構:
工作原理:
步進電機驅動器根據外來的控制脈沖和方向信號, 通過其內部的邏輯電路, 控制步進電機的繞組以一定的時序正向或反向通電, 使得電機正向/反向旋轉, 或者鎖定。
以1.8度兩相步進電機為例:當兩相繞組都通電勵磁時, 電機輸出軸將靜止并鎖定位置。在額定電流下使電機保持鎖定的最大力矩為保持力矩。如果其中一相繞組的電流發生了變向, 則電機將順著一個既定方向旋轉一步( 1.8度)。
同理, 如果是另外一項繞組的電流發生了變向, 則電機將順著與前者相反的方向旋轉一步( 1.8度)。當通過線圈繞組的電流按順序依次變向勵磁時, 則電機會順著既定的方向實現連續旋轉步進, 運行精度非常高。對于1.8度兩相步進電機旋轉一周需200步。
兩相步進電機有兩種繞組形式:雙極性和單極性。雙極性電機每相上只有一個繞組線圈, 電機連續旋轉時電流要在同一線圈內依次變向勵磁, 驅動電路設計上需要八個電子開關進行順序切換。
單極性電機每相上有兩個極性相反的繞組線圈, 電機連續旋轉時只要交替對同一相上的兩個繞組線圈進行通電勵磁。驅動電路設計上只需要四個電子開關。在雙極性驅動模式下, 因為每相的繞組線圈為100%勵磁, 所以雙極性驅動模式下電機的輸出力矩比單極性驅動模式下提高了約40%。